Underwater acoustic localization algorithms with environmental uncertainty, multipath propagation, and absence of line-of-sight, including performance bounds across a range of scenarios.
The ocean is one of the most challenging environments for acoustic localization: sound waves spread, refract, and reflect from the seabed and the surface, and multipath propagation is the rule rather than the exception. In addition, the medium varies not only over time, but also with depth, temperature, salinity, and other physical characteristics of the environment. As a result, models that are carefully calibrated under ideal conditions tend to break down when deployed in realistic settings. This raises a central scientific question: how can the location of an acoustic source be reliably determined in the presence of significant environmental uncertainty, partial information, and sometimes a complete absence of line-of-sight between the source and the sensors?
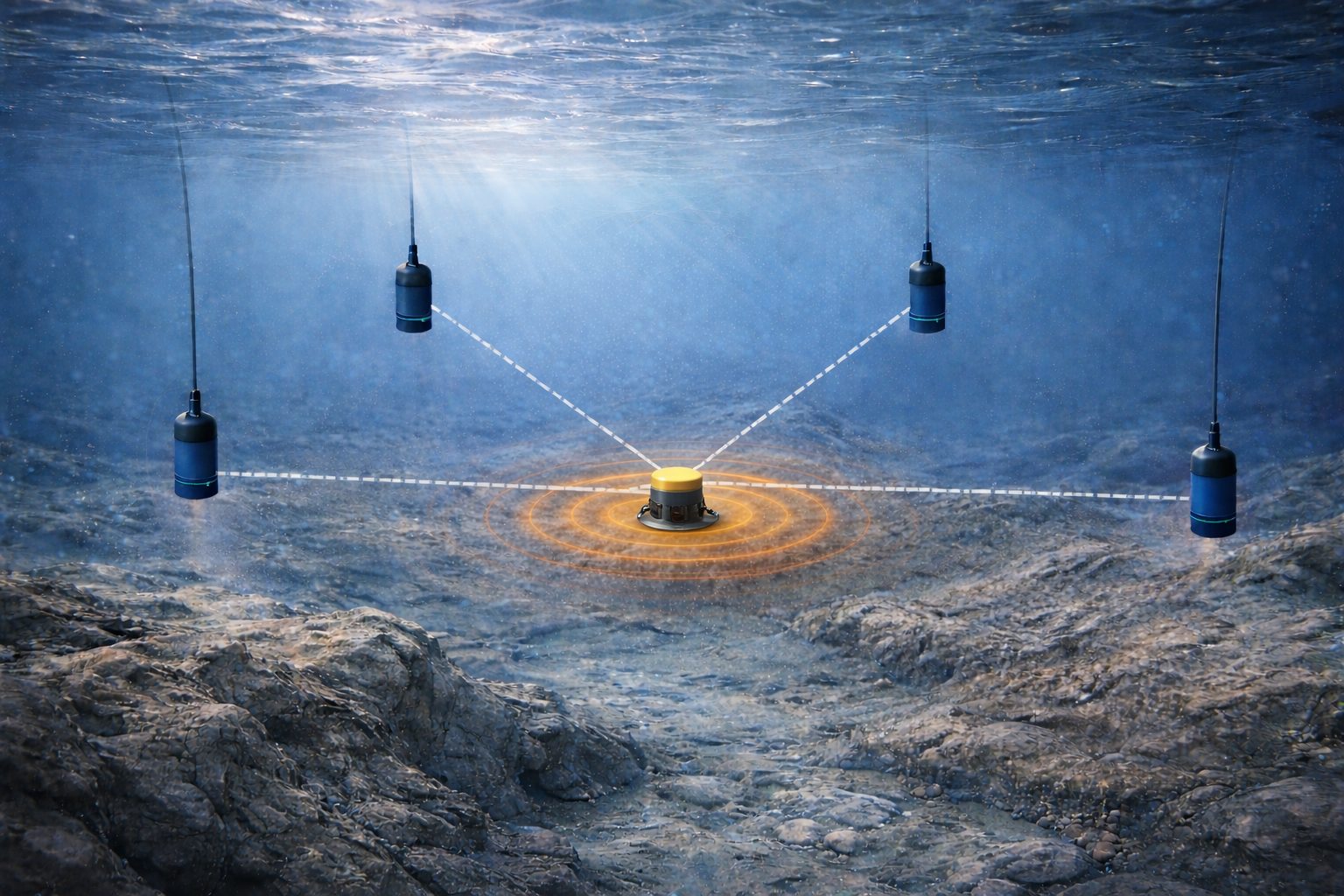
Our research in underwater acoustic localization focuses on developing new, accurate, and efficient methods that operate under such conditions. Within this project, we have developed a localization framework based on a multipath propagation model that enables source localization even in the presence of acoustic blockage along the direct line-of-sight to all sensors. In parallel with classical model-based approaches, we develop deep learning algorithms for direct localization that map raw data directly to source position, combining physical insight with statistical generalization capabilities. This integration leads to improved performance compared to traditional methods, while maintaining significantly lower computational complexity.